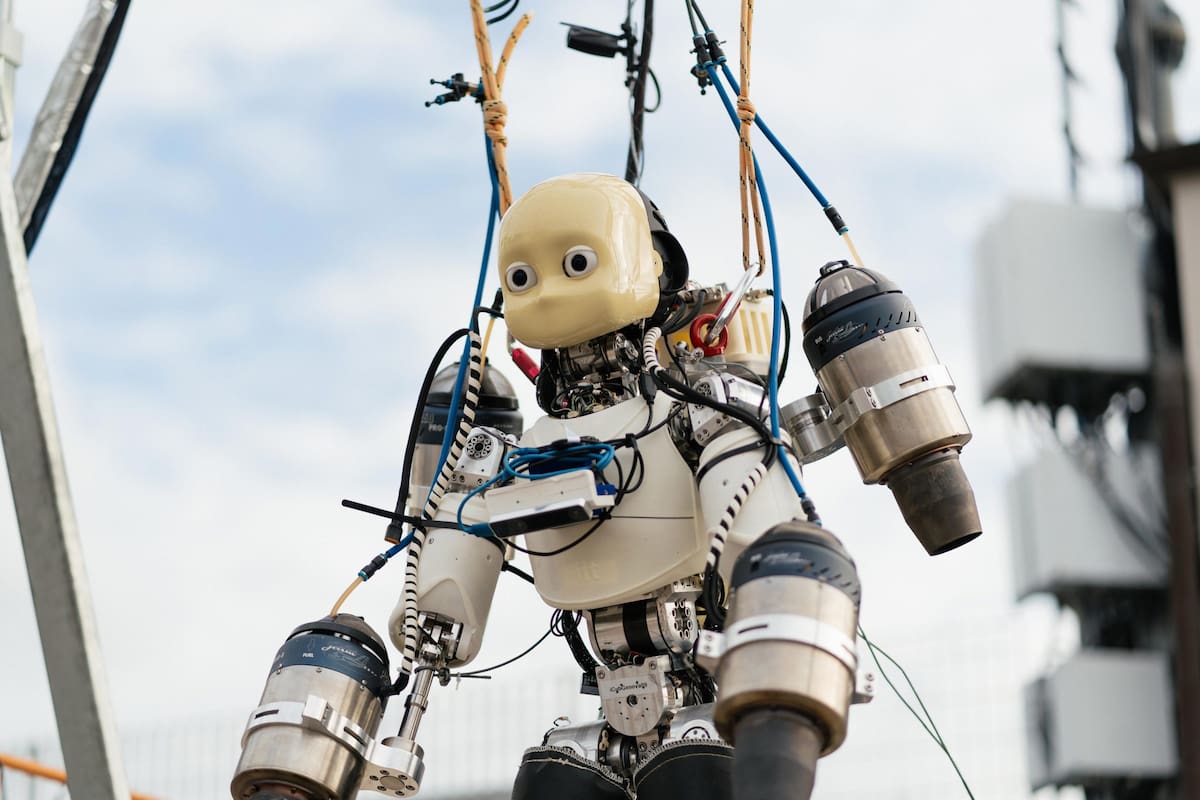
En un hito que evoca imágenes de ciencia ficción y de historias como las de Astroboy, el niño robot capaz de volar, o de Iron Man, el traje para volar de las películas protagonizadas por Robert Downey Jr, el Instituto Italiano de Tecnología (IIT), en colaboración con el Politécnico de Milán y la Universidad de Stanford, ha logrado el primer vuelo exitoso de iRonCub3, un robot humanoide con propulsión a chorro. Este avance, que vio al robot mantenerse en suspensión estable a medio metro del suelo, no solo es una proeza tecnológica, sino que sienta las bases para una nueva generación de robots voladores capaces de operar en entornos complejos con una estructura similar a la humana.
Diseñado sobre la plataforma del iCub3, este prototipo avanzado incorpora cuatro motores a reacción: dos ubicados en los brazos y dos en una mochila propulsora en su espalda. Esta configuración le otorga una capacidad de empuje máxima superior a los 1000 N. Con un peso aproximado de 70 kg, iRonCub3 ha sido diseñado para soportar condiciones extremas, incluyendo temperaturas de escape cercanas a los 800°C y ráfagas de viento, gracias a su columna vertebral de titanio y cubiertas resistentes al calor.
La capacidad de iRonCub3 para volar, ajustando su postura y controlando las fuerzas aerodinámicas, lo posiciona como un verdadero pionero en el campo de los robots multi-modales, prometiendo un futuro donde los humanoides puedan operar de manera autónoma y versátil en los entornos más desafiantes.
El camino hacia este logro no fue sencillo. Los investigadores enfrentaron el desafío de modelar y controlar las fuerzas aerodinámicas en un cuerpo humanoide no aerodinámico, con múltiples articulaciones y un centro de gravedad en constante cambio. Para superar esta complejidad, el equipo implementó una metodología integral: simulaciones de dinámica de fluidos computacional, experimentos en túnel de viento, y modelos de aprendizaje profundo en redes neuronales.
Estos modelos se integraron en un simulador que permitió el diseño de controladores conscientes de la aerodinámica. Las simulaciones de vuelo demostraron que estos controladores son esenciales para mantener la estabilidad del robot en presencia de viento, a diferencia de los controladores que ignoran estos efectos, que resultaron en fallos.
Este desarrollo es un paso fundamental hacia el objetivo de la robótica humanoide aérea, que busca dotar a los robots de la capacidad de combinar la locomoción aérea, la locomoción de contacto (como subir escaleras) y la manipulación. Las aplicaciones potenciales de iRonCub3 son vastas, incluyendo misiones de rescate en zonas de catástrofes, exploración de entornos inaccesible y tareas críticas en infraestructuras peligrosas.
Aunque las pruebas en vuelo real aún enfrentan limitaciones relacionadas con sensores de viento y la necesidad de instalaciones especializadas debido a las altas temperaturas de los motores, el equipo del IIT continúa trabajando en la mejora del diseño del robot, la integración de sensores a bordo y la optimización de los modelos aerodinámicos para el futuro. Se contempla una zona dedicada en el Aeropuerto de Génova para futuras pruebas.
La entrada Así es iRonCub3, el robot humanoide volador creado en Italia se publicó primero en DIARIO DIGITAL MORENO MEDIOS.